Utility for path creation inside the cell. More...
#include <polygon_slicer.h>
Public Types | |
| using | kernel = CGAL::Cartesian< double > |
| using | polygon = CGAL::Polygon_2< kernel > |
| using | point = kernel::Point_2 |
| using | traits = CGAL::Arr_segment_traits_2< kernel > |
| using | segment = traits::Segment_2 |
Public Member Functions | |
| polygon_slicer (const utils::polygon &poly) | |
| ~polygon_slicer () | |
| std::pair< int, int > | slice (double x_slice) const |
Detailed Description
Utility for path creation inside the cell.
Member Typedef Documentation
◆ kernel
| using polygon_slicer::kernel = CGAL::Cartesian<double> |
◆ polygon
| using polygon_slicer::polygon = CGAL::Polygon_2<kernel> |
◆ point
| using polygon_slicer::point = kernel::Point_2 |
◆ traits
| using polygon_slicer::traits = CGAL::Arr_segment_traits_2<kernel> |
◆ segment
| using polygon_slicer::segment = traits::Segment_2 |
Constructor & Destructor Documentation
◆ polygon_slicer()
|
explicit |
◆ ~polygon_slicer()
|
default |
Member Function Documentation
◆ slice()
| auto polygon_slicer::slice | ( | double | x_slice | ) | const |
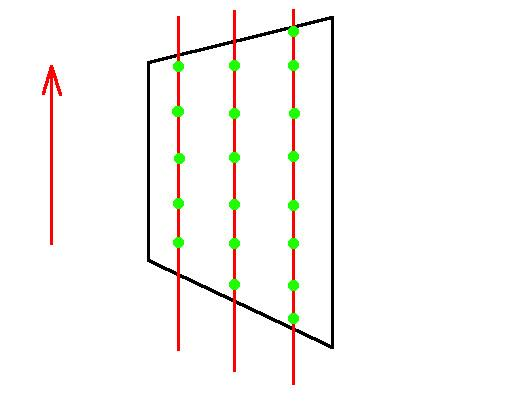
Assuming drone will fly vertically on the X = x_slice line (parallel to Y-axis), return the start and stop index of the waypoint that will cover given X = x_slice line
- Returns
- the start and stop indices of waypoints
- Note
- On the image below you can see the work of the method applied to three X = x_slice_(1|2|3) vertical lines
The documentation for this class was generated from the following files:
- polygon_slicer.h
- polygon_slicer.cpp