Class to build (x, y) mission path based on input polygon and home. More...
#include <mission_polygon.h>
Public Types | |
| using | kernel = CGAL::Exact_predicates_exact_constructions_kernel |
| using | traits = CGAL::Arr_segment_traits_2< kernel > |
| using | segment = traits::Segment_2 |
| using | point = kernel::Point_2 |
| using | arrangement = CGAL::Arrangement_2< traits > |
Public Member Functions | |
| mission_polygon (const utils::polygon &poly) | |
| ~mission_polygon () | |
| std::vector< utils::point > | make (const utils::point &home) |
| Build mission math. More... | |
Detailed Description
Class to build (x, y) mission path based on input polygon and home.
Initial polygon will be decomposed into simple polygons and further processed in mission_simple_polygon class. Then output mission path from mission_simple_polygon will be combined back into full mission path.
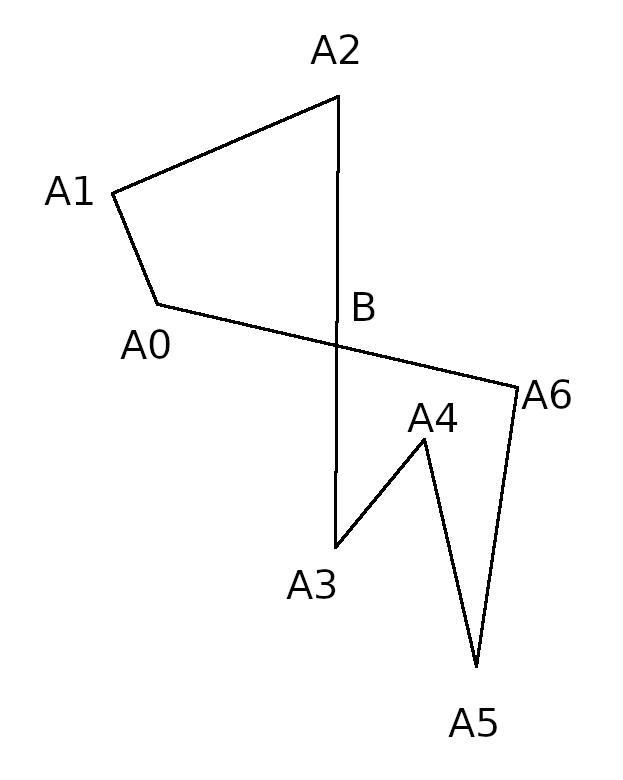
Example of a polygon showing a self-intersection shape. Here, polygon {A0, A1, A2, A3, A4, A5, A6} will be split into two polygons: {A0, A1, A2, B} and {A3, A4, A5, A6, B}.
Member Typedef Documentation
◆ kernel
| using mission_polygon::kernel = CGAL::Exact_predicates_exact_constructions_kernel |
◆ traits
| using mission_polygon::traits = CGAL::Arr_segment_traits_2<kernel> |
◆ segment
| using mission_polygon::segment = traits::Segment_2 |
◆ point
| using mission_polygon::point = kernel::Point_2 |
◆ arrangement
| using mission_polygon::arrangement = CGAL::Arrangement_2<traits> |
Constructor & Destructor Documentation
◆ mission_polygon()
|
explicit |
- Parameters
-
poly (x, y) input polygon
◆ ~mission_polygon()
|
default |
Member Function Documentation
◆ make()
| auto mission_polygon::make | ( | const utils::point & | home | ) |
Build mission math.
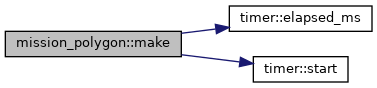
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- mission_polygon.h
- mission_polygon.cpp