Mission polygon without self-intersections. More...
#include <mission_simple_polygon.h>
Public Types | |
| using | polygon = utils::polygon |
| using | point = utils::point |
Public Member Functions | |
| mission_simple_polygon (const polygon &poly) | |
| ~mission_simple_polygon () | |
| bool | visited () const |
| Once the build_path is used the instance is marked as visited. More... | |
| double | distance (const point &start) const |
The distance from point start to the closest polygon waypoint from where path can be constructed. More... | |
| void | build_path (const point &start, std::vector< point > *result) |
| Build mission path. More... | |
| std::size_t | waypoint_count () const |
| The minimum number of waypoints the polygon can be covered by. More... | |
Detailed Description
Mission polygon without self-intersections.
For each edge of the polygon the mission_directed_polygon instance will be created. Each such instance will be checked for the number of waypoints, and only those with a minimal number of waypoints will be kept. When build_path is called we will use closest instance of mission_directed_polygon for path construction
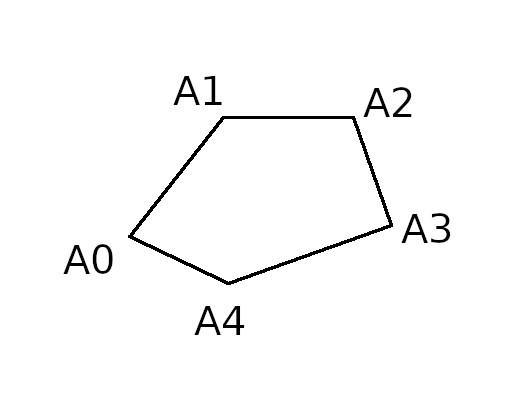
E.g., the simple polygon {A0, A1, A2, A3, A4} will produce five instances of the directed polygons, shown below by the red arrows.

Member Typedef Documentation
◆ polygon
◆ point
Constructor & Destructor Documentation
◆ mission_simple_polygon()
|
explicit |

◆ ~mission_simple_polygon()
|
default |
Member Function Documentation
◆ visited()
| auto mission_simple_polygon::visited | ( | ) | const |
Once the build_path is used the instance is marked as visited.
- Returns
- true build_path is called already
- false build_path is not called yet
◆ distance()
| auto mission_simple_polygon::distance | ( | const point & | start | ) | const |
The distance from point start to the closest polygon waypoint from where path can be constructed.
◆ build_path()
Build mission path.
- Parameters
-
start Starting point of the mission path result vector where mission path will be saved

◆ waypoint_count()
| auto mission_simple_polygon::waypoint_count | ( | ) | const |
The minimum number of waypoints the polygon can be covered by.
- Note
- Zero number of waypoints can be returned in case if the effective polygon area is zero, i.e. polygon is the result of approximation error
The documentation for this class was generated from the following files:
- mission_simple_polygon.h
- mission_simple_polygon.cpp