Waypoint data.
More...
#include <waypoint.h>
◆ waypoint()
| waypoint::waypoint |
( |
double |
latitude, |
|
|
double |
longitude |
|
) |
| |
|
defaultnoexcept |
◆ ~waypoint()
◆ is_default_altitude()
| auto waypoint::is_default_altitude |
( |
| ) |
const |
- Returns
- true if the current waypoint's altitude has a default value
◆ set_custom_altitude()
| void waypoint::set_custom_altitude |
( |
float |
laser_range | ) |
|
- Parameters
-
| [in] | laser_range | Drone's height value returned from laser measurement |
◆ altitude()
| auto waypoint::altitude |
( |
| ) |
const |
◆ lat()
| double waypoint::lat |
( |
| ) |
const |
|
inline |
◆ lon()
| double waypoint::lon |
( |
| ) |
const |
|
inline |
◆ set_ready()
| void waypoint::set_ready |
( |
bool |
is_forward | ) |
|
Mark waypoint as ready.
- Parameters
-
| [in] | is_forward | true - forward mission is ready, false - backward mission is ready |
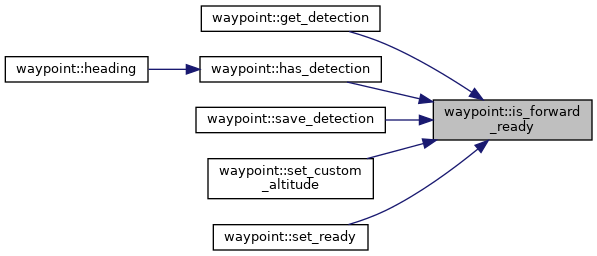
◆ is_forward_ready()
| auto waypoint::is_forward_ready |
( |
| ) |
const |
- Returns
- true If forward mission is ready
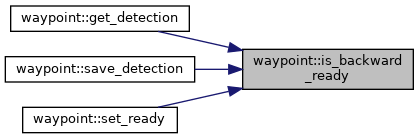
◆ is_backward_ready()
| auto waypoint::is_backward_ready |
( |
| ) |
const |
- Returns
- true If backward mission is ready
◆ has_detection()
| auto waypoint::has_detection |
( |
| ) |
const |
- Returns
- true If some objects were detected
◆ heading()
| auto waypoint::heading |
( |
| ) |
const |
- Returns
- Expected drone's heading in this waypoint
- Note
- In the forward mission, the drone heading is automatic, but when the backward mission is launched, the heading is set manually to match the same drone's position as in the forward mission.
◆ save_detection()
When inference finished, save the detected objects.
◆ get_detection()
| auto waypoint::get_detection |
( |
| ) |
const |
◆ expected_height
| constexpr float waypoint::expected_height {15.0F} |
|
staticconstexpr |
Waypoint expected height, default height.
The documentation for this class was generated from the following files: